This work presents an autonomous task planning system based on a structured
Plan → Execute → Evaluate → Retry / Replan control loop.
Given a high-level user goal, the system decomposes it into tasks, executes them step by step, evaluates the outcomes, retries or replans when necessary, and terminates safely using predefined guardrails.
Rather than focusing on raw generation, this work emphasizes controlled autonomy, where decision-making is explicit, observable, and bounded—an essential requirement for reliable agentic AI systems.
Most AI applications today are prompt-driven: they take an input, generate an output, and stop.
While effective for isolated tasks, such systems cannot reason about progress, evaluate outcomes, or adapt behavior when execution deviates from expectations.
An agentic AI system is defined not by generation alone, but by its ability to plan actions, execute tasks, evaluate results, and decide what to do next under explicit control logic.
However, autonomy without control is unsafe. Unbounded retries, hallucinated success, and infinite execution loops are common failure modes in naïve autonomous systems. For this reason, agentic behavior must be paired with evaluation mechanisms and termination guarantees.
This project demonstrates a bounded form of autonomy, where agent behavior is intentionally constrained through evaluation logic and safety limits, enabling reliable multi-step execution without human intervention.
Traditional scripts and linear automation pipelines execute predefined steps and fail silently when conditions change. They lack:
As AI systems are increasingly used for multi-step reasoning and task execution, there is a need for autonomous systems that can evaluate their own outputs, adapt execution strategies, and stop safely.
The Autonomous Task Planner addresses this problem by implementing:
The system continues autonomously until the goal is completed or a termination condition is reached.
📁 Planner (planner.py)
Converts a high-level goal into an ordered list of tasks.
📁 Executor (executor.py, executor_llm.py)
Executes one task at a time and produces task output.
📁 Evaluator (evaluator.py)
Acts as the control authority, evaluating task output and deciding the next action.
📁 State Manager (state.py)
Maintains global execution state across the control loop.
📁 Configuration (config.py)
Enforces strict execution limits to guarantee termination.
The diagram below illustrates the bounded Plan–Execute–Evaluate control loop implemented in the system.
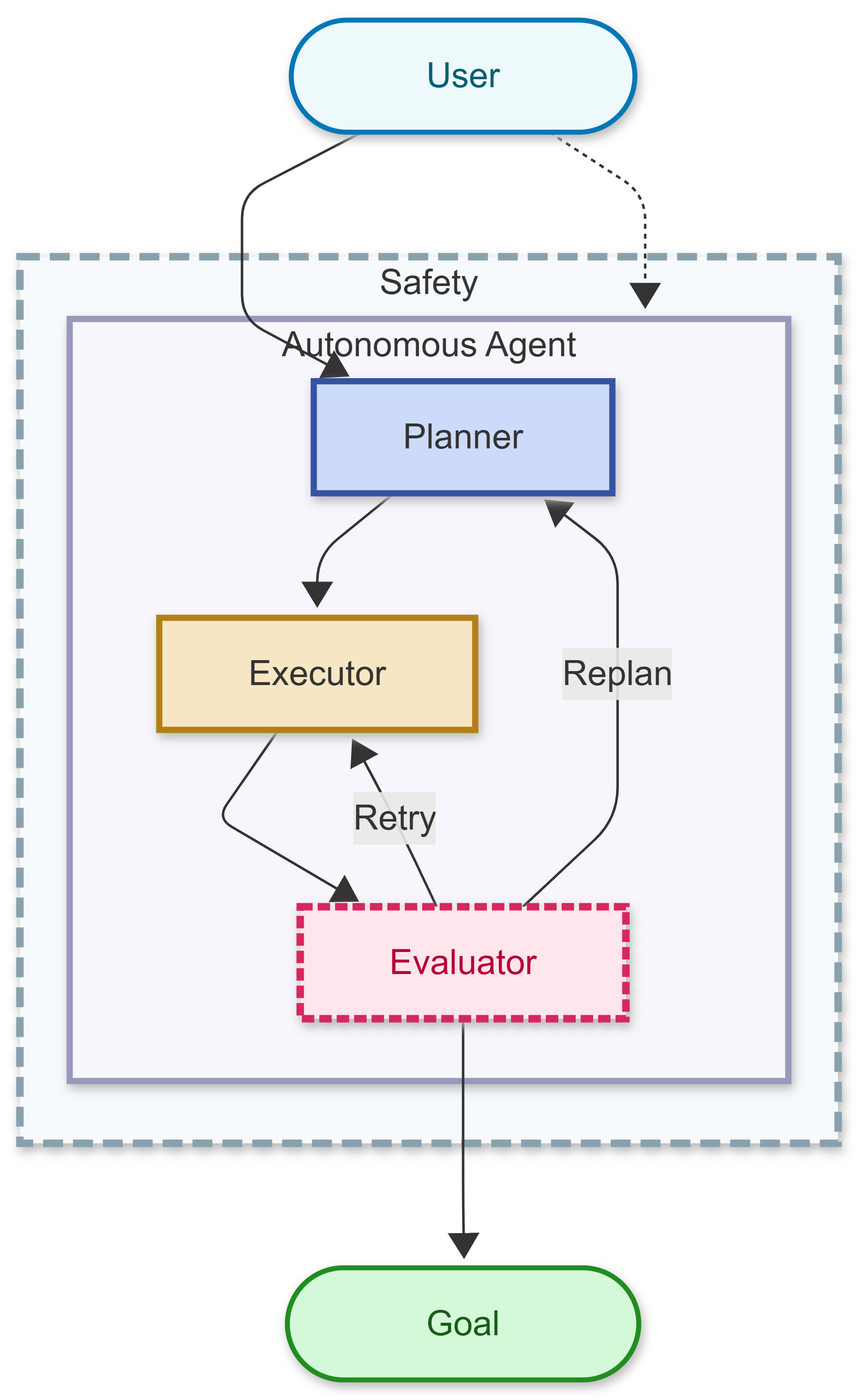
🔁 The control loop iterates across tasks, with the Evaluator governing retries and replans until completion or safe termination.
Each transition in the loop is governed by explicit evaluation logic and safety constraints, ensuring deterministic and observable system behavior.
This system prioritizes clarity, safety, and determinism over architectural complexity. Key design decisions include:
These choices reflect a focus on bounded autonomy rather than unconstrained agent behavior.
A lightweight Streamlit-based UI (ui.py) is provided to demonstrate user interaction.
The UI serves as a demonstration layer only.
The core autonomous system is executed and validated via main.py.
Goal:
Prepare a 4-week Python interview preparation plan
System Behavior
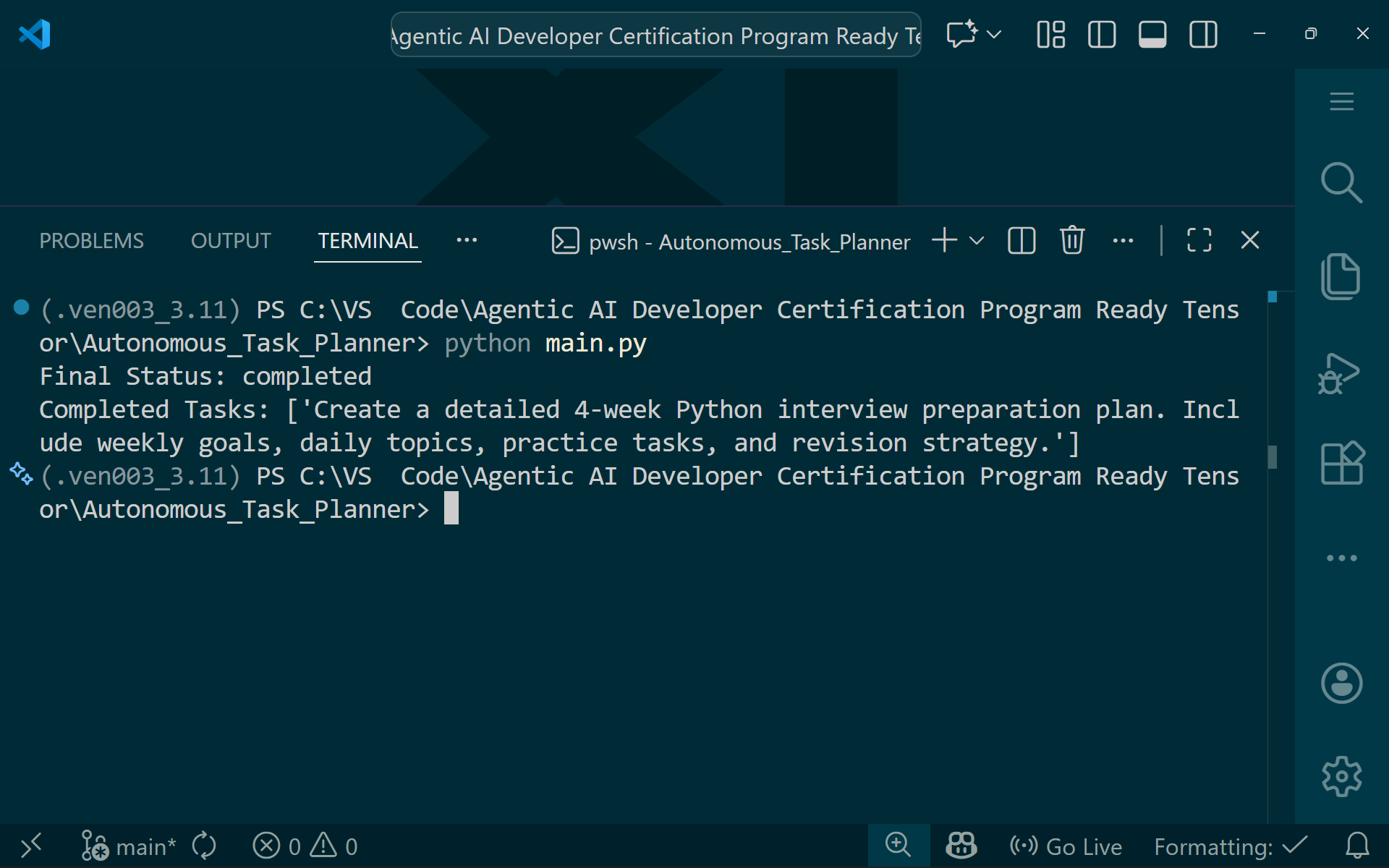
Final Status
completed
git clone https://github.com/prithvi-18/Agentic-AI-Developer-Certification-Program.git cd Autonomous_Task_Planner pip install -r requirements.txt
python main.py
streamlit run ui.py
This project demonstrates that effective autonomy is not achieved by removing control, but by designing it explicitly.
By combining structured planning, execution, evaluation, and safety constraints, the Autonomous Task Planner illustrates how agentic systems can operate reliably without unbounded behavior. While intentionally simple in scope, the system highlights foundational principles that scale to more complex agent architectures.
The work emphasizes that safe autonomy is a design choice, and that agentic AI systems must be evaluated not only by what they can generate, but by how predictably and responsibly they behave.
GitHub:
https://github.com/prithvi-18/Agentic-AI-Developer-Certification-Program
📁 Module Folder: Autonomous_Task_Planner/