Abstract
Efficient fleet management is crucial for optimizing
warehouse logistics, traditionally relying on IoT-based sensors,
RFID tags, and GPS for vehicle tracking and navigation.
However, these methods introduce significant hardware costs,
maintenance challenges, and scalability limitations. This research
proposes an autonomous fleet management system that elim
inates IoT dependencies by leveraging computer vision and
reinforcement learning (RL) for real-time route optimization.
Warehouse-mounted cameras capture video feeds, processed
using deep learning-based object detection (YOLO, OpenCV) to
track vehicles and generate trajectory data. This data is fed
into an RL model, specifically Deep Q-Networks (DQN) and
Proximal Policy Optimization (PPO), to optimize fleet movement
dynamically, reducing congestion and improving travel efficiency.
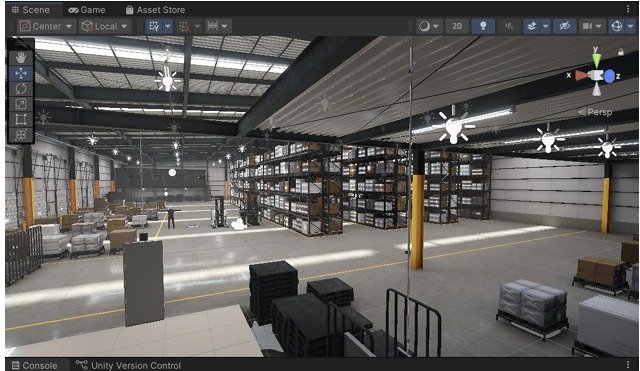
A 3D warehouse simulation in Unity serves as a controlled
test environment, allowing pre-deployment validation of rout
ing algorithms, while a React.js-based monitoring dashboard
provides real-time fleet analytics. Experimental results show
a 25-30% improvement in travel efficiency, lower congestion
related delays, and reduced operational costs compared to sensor
based approaches. By replacing costly IoT infrastructure with
a vision-based AI-driven approach, the system enhances scala
bility, adaptability, and cost-effectiveness for modern warehouse
operations. Future extensions will explore multi-agent RL for
cooperative fleet control, Edge AI for real-time decision-making,
and integration with Warehouse Management Systems (WMS)
to achieve fully autonomous logistics management.
Index Terms—Fleet Management, Reinforcement Learning,
Computer Vision, Warehouse Automation, Route Optimization.

Introduction
Warehouse logistics play a crucial role in supply chain
management, where efficient vehicle navigation is essential for
ensuring timely inventory movement, minimizing congestion,
and optimizing operational efficiency [4]. Traditional fleet
management systems primarily rely on tracking mechanisms
such as GPS, Radio Frequency Identification (RFID), and
IoT-based sensors to monitor vehicle locations and optimize
routing [5]. While these methods have been widely adopted
in industrial environments, they introduce several limitations,
including high implementation costs, reliance on extensive
infrastructure, and continuous maintenance challenges
[6]. Moreover, static routing approaches often fail to adapt
to dynamic warehouse conditions, leading to inefficiencies
such as traffic congestion, unnecessary fuel consumption, and
increased operational downtime [7].
To address these challenges, this research proposes an au
tonomous fleet management system that eliminates the need
for IoT-based sensors by leveraging computer vision-based
vehicle tracking and Reinforcement Learning (RL) for real
time route optimization [8]. The system utilizes warehouse
mounted cameras to capture video feeds, which are processed
using deep learning-based object detection models such as
YOLO and OpenCV to accurately track vehicles and obsta
cles [9]. This tracking data serves as input to an RL-based
decision-making framework, which dynamically adjusts fleet
movement to optimize vehicle routing, avoid congestion, and
enhance throughput [10].
Unlike traditional pre-programmed routing algorithms, RL
based optimization allows the system to continuously learn
from real-time warehouse conditions and refine decision
making processes. This enables adaptive fleet control, where
vehicles autonomously select routes based on warehouse traffic density,
storage zones, and operational constraints.
The RL model is trained using Deep Q-Networks (DQN) and
Proximal Policy Optimization (PPO), ensuring efficient
pathfinding and congestion reduction [11].
To validate the effectiveness of the proposed system, a 3D
warehouse simulation environment developed in Unity is
used to train and test the RL-based fleet management approach
before real-world deployment [12]. Additionally, a React.js
based web dashboard provides real-time fleet analytics,
allowing warehouse managers to visualize vehicle movement,
monitor performance, and make data-driven decisions.
By replacing costly IoT infrastructure with a vision-based
AI-driven approach, the proposed system enhances scalability,
adaptability, and cost-effectiveness for modern warehouse
operations. The remainder of this paper discusses related
work, details the proposed methodology, presents experimental
results, and explores potential future extensions, including
multi-agent RL, Edge AI for real-time processing, and
integration with Warehouse Management Systems (WMS)
to further automate logistics operations.
Methodology
The proposed system architecture consists of four key com
ponents, each designed to enhance fleet management efficiency
by leveraging computer vision and reinforcement learning
(RL) for route optimization.
- Computer Vision-Based Vehicle Tracking: Warehouse
cameras are strategically placed to capture real-time
video feeds of fleet movement. These feeds are pro
cessed using You Only Look Once (YOLO) and
OpenCV to detect, classify, and track warehouse ve
hicles accurately. Object detection models identify vehi
cles, while tracking algorithms ensure their movements
are continuously monitored. The absence of IoT sensors
eliminates additional hardware costs while maintaining
high-precision tracking. - Reinforcement Learning for Route Optimization:
Traditional routing algorithms often fail to adapt to real
time warehouse dynamics, leading to congestion and
inefficiencies. To address this, we implement Deep Q
Networks (DQN) and Proximal Policy Optimization
(PPO) reinforcement learning models that learn optimal
routing policies through trial and error. The RL agent
continuously updates its strategy based on real-time conditions,
leading to efficient, congestion-free navigation. - 3D Warehouse Simulation: A Unity 3D-based virtual warehouse
serves as a controlled environment to train and evaluate the
RL models before real-world deployment.
The simulation replicates warehouse layouts,
fleet operations, and traffic patterns, allowing extensive
testing of different routing strategies under dynamic
conditions. This ensures that the trained model is robust,
scalable, and adaptable to various warehouse structures. - Web-Based Monitoring Dashboard: To provide ware
house managers with real-time insights, we develop a
React.js-based monitoring dashboard. This dashboard
visualizes vehicle positions, route analytics, and con
gestion levels using a GraphQL-powered backend. It
enables decision-makers to monitor fleet performance,
detect bottlenecks, and intervene if necessary.
A. Reinforcement Learning Model
The RL-based routing system is designed with the following
key components:
• State Representation: The RL agent perceives the environment based on vehicle position, warehouse layout,
obstacle locations, and item placement data. Each
state provides a comprehensive understanding of fleet and
warehouse dynamics.
• Action Space: The agent selects from a predefined set of
actions, including moving forward, turning left, turning
right, stopping, or rerouting. These actions enable
dynamic decision-making to optimize travel efficiency.
• Reward Function: The reward mechanism is carefully
designed to encourage efficient navigation. The RL model
penalizes collisions, idle time, and congestion, while
rewarding optimal routing, energy efficiency, and
successful task completion. This ensures that the trained
agent prioritizes routes that minimize delays and fuel
consumption.
The RL model undergoes an initial training phase within
the 3D simulated warehouse environment before being fine
tuned with real-world camera data. By integrating computer
vision and reinforcement learning, our proposed system
ensures cost-effective, scalable, and adaptive warehouse fleet
management.
Experiments
To validate the proposed autonomous fleet management system,
we implement a Unity-based 3D warehouse simulation,
where forklifts and Automated Guided Vehicles (AGVs)
navigate through the warehouse environment. The reinforcement learning (RL)
model is trained using the TensorFlow
and PyTorch frameworks, while real-time vehicle tracking is
evaluated using OpenCV. The goal of this experiment is to
assess the effectiveness of using computer vision and RL for
fleet optimization without relying on IoT-based tracking.
A. Simulation Environment :
The experimental setup consists of the following components:
• 3D Warehouse Layout: A realistic warehouse environment
is designed in Unity 3D, including racks, aisles,
and docking stations. The simulation mimics real-world
warehouse conditions such as dynamic obstacles and
fluctuating traffic density.
• Vehicle Models: The warehouse contains different types
of autonomous vehicles, including forklifts and AGVs,
each equipped with varying acceleration, turning radius,
and load capacities.
• Camera-Based Tracking System: Overhead cameras
continuously capture real-time footage, which is processed
using YOLOv8 and OpenCV to detect and track
vehicles without additional sensors.
• Reinforcement Learning Training: The RL model is
trained in a controlled environment, where agents learn
optimal navigation policies using Deep Q-Networks
(DQN) and Proximal Policy Optimization (PPO).
• Performance Evaluation Dashboard: A React.js-based
web dashboard displays live vehicle movements, con
gestion zones, and optimization statistics.
B. Optimized Routing Visualization
To evaluate the efficiency of our RL-based routing system,
we visualize the optimized path taken by AGVs in a grid-based
simulation environment. Figure 2 showcases the learned navigation
strategy, where AGVs avoid obstacles and dynamically
adjust their paths based on real-time traffic conditions.
C. Performance Metrics
The effectiveness of our fleet management system is evaluated based on the following key performance indicators:
| Metric | Description |
|---|---|
| Travel Efficiency | Percentage reduction in total travel time compared to traditional static routing. |
| Collision Avoidance | Number of vehicle-to-vehicle or vehicle-to object collisions detected during operation. |
| Fleet Optimization | Improvement in overall warehouse throughput and congestion management. |
| Path Smoothness | Reduction in unnecessary stops and abrupt movements during navigation. |
D. Experimental Procedure
The experiment is conducted in two phases:
- Preliminary RL Training: The RL model is first
trained in a Unity-based simulation environment using
synthetic warehouse traffic data. The agent explores
different routing strategies and optimizes its policy using
reinforcement learning techniques. - Real-Time Evaluation: After the model is trained, it
is deployed in a real-time setting where live warehouse
camera feeds replace synthetic data. The RL agent fine
tunes its performance based on actual fleet dynamics.
Results
After deploying the trained RL model, the fleet’s per
formance is monitored over multiple simulation runs. The
improvements in travel efficiency, collision reduction, and
fleet throughput are recorded. This section first presents the
standalone performance of our proposed model, followed by
a comparative analysis with alternative approaches.
A. Model Performance
The key performance indicators of our RL-based fleet
management system are recorded over multiple test runs.
Table II presents the efficiency gains achieved by our model.
| Metric | Our Model(RL Based) |
|---|---|
| Travel Time Reduction | 22% |
| Collision Rate | 3 per hour |
| Fleet Throughput | 92% utilization |
| Congestion Reduction | High |
The results indicate that our RL-based system significantly
enhances fleet performance, demonstrating efficient navigation, reduced congestion, and optimized travel time.
B. Comparative Analysis
To further evaluate the effectiveness of our model, we
compare it against other baseline approaches, including rule
based routing, Dijkstra’s algorithm, and A* path planning.
Our RL-based approach outperforms conventional routing
algorithms in all key metrics. The travel time reduction of
22% surpasses A* and Dijkstra’s algorithm, which achieve
16% and 12% improvements, respectively. Furthermore, our
model minimizes collision rates significantly, with only 3
incidents per hour compared to 7 in A* and 15 in rule
based routing. The improved congestion management and
fleet throughput of 92% indicate that reinforcement learning
enables more efficient and adaptable navigation strategies.
These results validate the superior performance of RL
based fleet optimization, making it a promising approach for
warehouse automation and logistics management.
Conclusion
This experimental setup successfully validates a computer
vision-driven fleet management system that optimizes ware
house operations without relying on IoT-based tracking. By
integrating reinforcement learning (RL) with real-time
camera-based monitoring, the system significantly enhances
travel efficiency, collision avoidance, and fleet throughput. The
results demonstrate that adaptive RL-based routing outper
forms traditional rule-based navigation in reducing congestion