3D Object Detection With YOLO
Table of contents
🎓 Successfully Completed Bachelor's Thesis: 3D Object Detection on the NVIDIA Jetson Orin Nano for Robotic Applications
I'm excited to present my completed Bachelor's thesis, in which I developed a camera-based 3D object detection system for robotic systems. The goal was to combine modern AI methods with efficient edge computing hardware – for precise and real-time capable solutions in industrial applications.
🔧 Technology Used:
• Hardware
– NVIDIA Jetson Orin Nano (powerful edge device for AI)
– ZED Mini Stereo Camera (real-time 3D depth sensing)
• Software & Methods
– YOLOv8 (deep learning for object detection)
– PyTorch & CUDA (GPU-accelerated inference)
– OpenCV (image processing & visualization)
🎯 Focus Areas & Results:
• Filtering of depth noise for stable 3D data
• Projection of 3D coordinates onto 2D image planes
• Real-time calculation of distances and object dimensions
• Combination of 2D object detection (YOLO) with depth data from the stereo camera
📊 Applications & Benefits:
The solution enables precise localization and measurement of objects in real time – essential for robotic applications in industry, logistics, or autonomous navigation. I also compared various depth estimation methods and optimized performance for real-time deployment.
🔍 Insights & Code:
More details and sample images can be found in the GitHub repository:
👉 GitHub
🧪 Results:

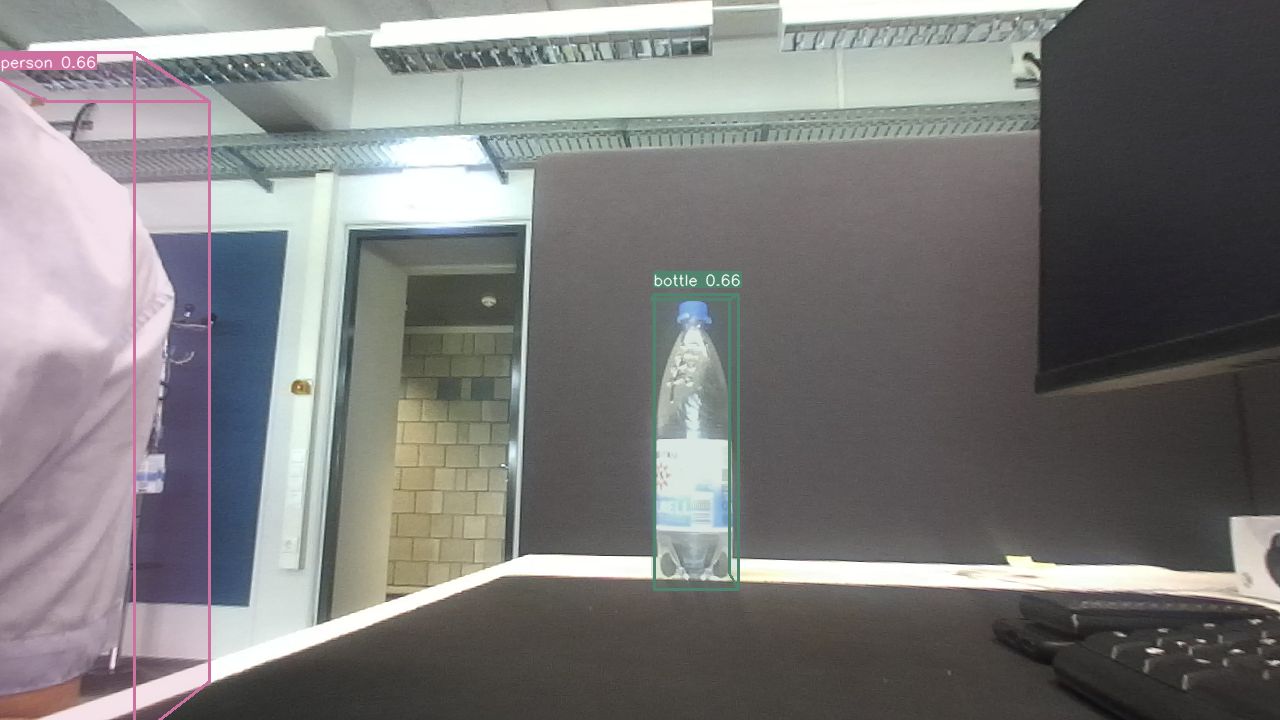
#AI #Robotics #3DObjectDetection #ComputerVision #EdgeAI #JetsonNano #DeepLearning #3DKamera #YOLO