UAV-Based Traffic Monitoring System

Overview
This system enables real-time monitoring of vehicular traffic using UAV footage. It employs advanced computer vision techniques for:
- Vehicle Detection: Identifies and classifies different vehicle types.
- Tracking: Assigns unique tracking IDs to vehicles and maintains their trajectories.
- Speed and Direction Estimation: Computes vehicle speed and movement direction.
- Data Logging: Records all detection and tracking information into CSV files for further analysis.
- Trajectory Visualization: Overlays vehicle trajectories and annotations on video frames.
- Tracking vehicles in zones: Tracking vehicles within specific zones allows for more focused insights, enabling precise monitoring and analysis of areas of interest, such as entry points or restricted zones.
Features
Key Capabilities
- Multi-Vehicle Tracking: Robust tracking and trajectory plotting for multiple vehicles in the video.
- Speed Estimation: Accurate calculation of vehicle speeds based on pixel displacement and video frame rate.
- Direction Analysis: Determines the direction of vehicle movement using angular thresholds.
- Data Export: All processed data is exported to a structured CSV file for downstream analytics.
Outputs
- Annotated video with bounding boxes, trajectories, and vehicle details.
- CSV file containing:
- Timestamp
- Frame ID
- Vehicle ID
- Vehicle type
- Speed (km/h)
- Movement direction
- Bounding box center coordinates (x, y)
Implementation Details
Dependencies
- Python 3.x
- OpenCV
- NumPy
- Ultralytics solutions
- Custom configuration file (
config.py) containing model paths and video parameters.
Code Structure
CustomTrackZone Class
This class extends the TrackZone solution from Ultralytics to include:
-
Speed and Direction Calculation:
- Calculates speed based on the displacement of the tracked object in consecutive frames.
- Determines movement direction using predefined angular thresholds.
-
Data Logging:
- Appends tracking information to a CSV file for each detected object in each frame.
-
Trajectory Visualization:
- Draws the movement trajectory of each tracked object directly on the video frames.
parse_arguments() Function
Parses command-line arguments for specifying:
- Source video path
- Output video path
- Model path
Main Program
- Captures video frames and processes them using
CustomTrackZone. - Annotates frames with bounding boxes, trajectories, and vehicle information.
- Saves the annotated video and logs data to a CSV file.
- Displays a real-time preview of the processed video.
Usage Instructions

Command-Line Arguments
Run the script with the following arguments:
python uav_traffic_monitoring.py \ --source_video_path path/to/source/video \ --target_video_path path/to/output/video \ --model_path path/to/model
Example
python uav_traffic_monitoring.py \ --source_video_path ./input.mp4 \ --target_video_path ./output.mp4 \ --model_path ./models/yolov8.pt
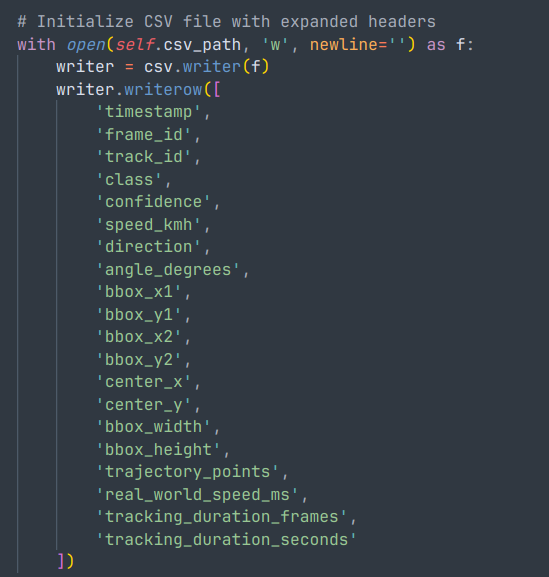
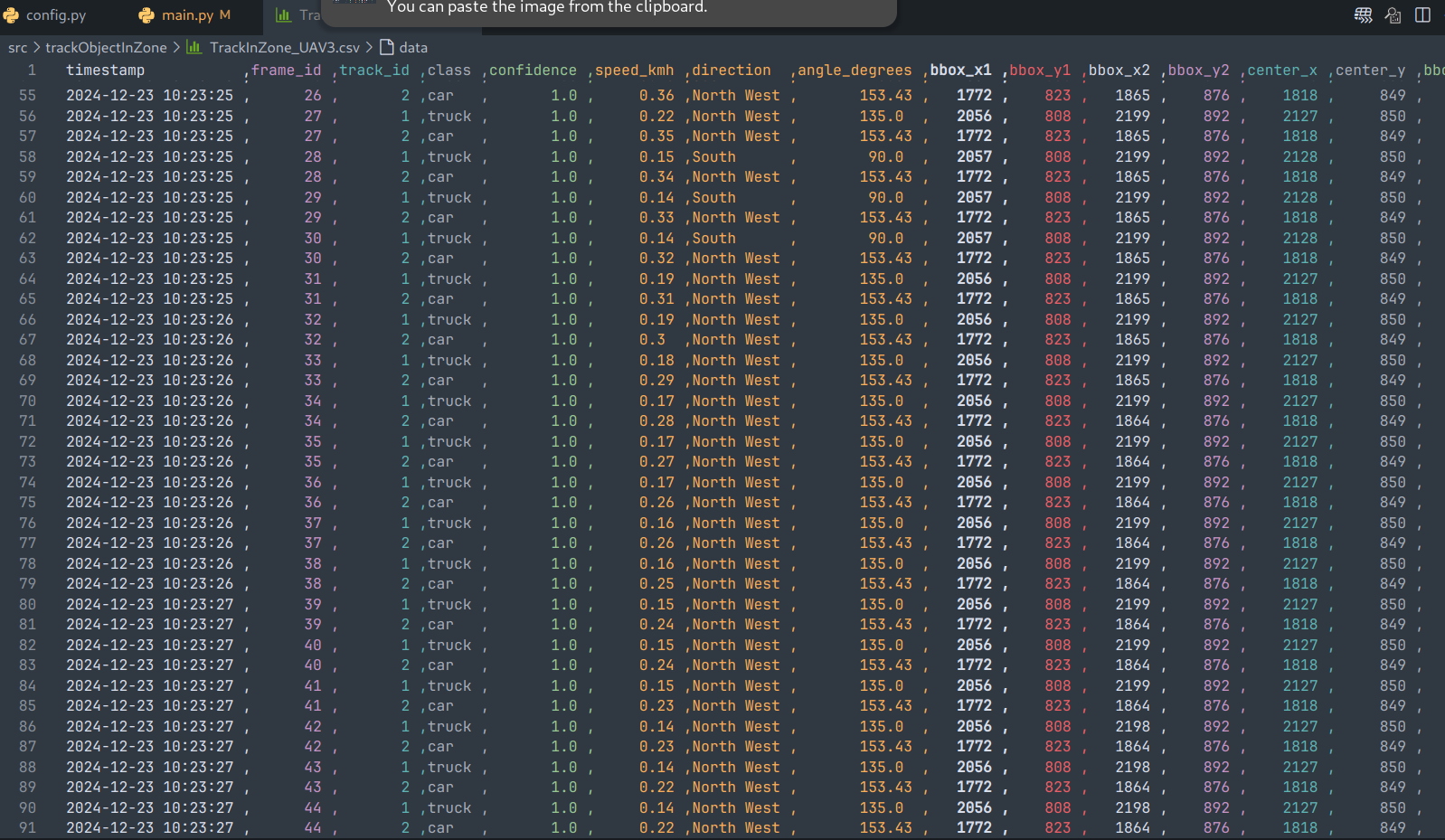
CSV Output Format
The generated CSV file includes the following fields:
- timestamp: Time of frame processing.
- frame_id: Index of the processed frame.
- track_id: Unique ID assigned to each tracked vehicle.
- class: Vehicle type (e.g., car, truck, motorcycle).
- speed_kmh: Vehicle speed in kilometers per hour.
- direction: Movement direction (e.g., North, South).
- center_x, center_y: Center coordinates of the bounding box.
Code Snippet
Here is a brief explanation of some key components:
Speed and Direction Calculation
def calculate_speed_and_direction(self, track_id): # Ensure sufficient history exists for calculation if track_id not in self.track_history or len(self.track_history[track_id]) < 2: return 0, "Unknown", 0 history = self.track_history[track_id] start_pos, end_pos = history[0], history[-1] dx, dy = end_pos[0] - start_pos[0], end_pos[1] - start_pos[1] angle = math.degrees(math.atan2(dy, dx)) % 360 # Determine movement direction direction = "Unknown" for start_angle, end_angle, dir_name in DIRECTION_THRESHOLDS: if start_angle <= angle < end_angle: direction = dir_name break # Compute speed in km/h real_dx = dx / UAV_X_SCALE real_dy = dy / UAV_Y_SCALE distance = math.sqrt(real_dx**2 + real_dy**2) time = len(history) / self.fps speed = (distance / time) * 3.6 # Convert m/s to km/h return speed, direction, angle
Frame Processing
def trackzone(self, im0, frame_idx): self.annotator = Annotator(im0, line_width=self.line_width) masked_frame = cv2.bitwise_and(im0, im0, mask=cv2.fillPoly(np.zeros_like(im0[:, :, 0]), [self.region], 255)) self.extract_tracks(masked_frame) current_time = datetime.now().strftime("%Y-%m-%d %H:%M:%S") with open(self.csv_path, 'a', newline='') as f: writer = csv.writer(f) for box, track_id, cls in zip(self.boxes, self.track_ids, self.clss): x1, y1, x2, y2 = map(int, box) center_x, center_y = (x1 + x2) // 2, (y1 + y2) // 2 # Update and visualize trajectory if track_id not in self.track_history: self.track_history[track_id] = [] self.track_history[track_id].append((center_x, center_y)) points = np.array(self.track_history[track_id], dtype=np.int32) if len(points) >= 2: cv2.polylines(im0, [points], isClosed=False, color=colors(track_id, True), thickness=2) # Log data and annotate frame speed, direction, _ = self.calculate_speed_and_direction(track_id) writer.writerow([current_time, frame_idx, track_id, self.names[cls], round(speed, 2), direction, center_x, center_y]) label = f"{self.names[cls]}:{track_id} {int(speed)}km/h {direction}" if speed > 2 else f"{self.names[cls]}:{track_id} (Stop)" self.annotator.box_label(box, label=label, color=colors(track_id, True)) return im0
Conclusion
This UAV-based traffic monitoring system effectively demonstrates how modern computer vision techniques can be applied to traffic management. By integrating advanced object detection and tracking algorithms, the system achieves accurate vehicle detection, classification, and tracking. The inclusion of trajectory plotting and speed estimation enhances its utility for analyzing traffic patterns and behavior. Furthermore, exporting data to CSV files allows for deeper insights through post-processing and analytics.

The system's modular design makes it extensible for further improvements, such as incorporating multi-camera setups or leveraging additional sensor data. This project serves as a foundation for developing scalable traffic monitoring solutions using UAVs.
References
- Ultralytics. "Track In Zone - Ultralytics Documentation." TrackZone Documentation.
- Roboflow. "Supervision Repository." GitHub Repository.