Offline object detection on HoloLens using Yolo and Sentis
Table of contents
Offline object detection on HoloLens using Yolo and Sentis
This Unity project is used for executing 2D image object recognition models on the HoloLens2 hardware using the Unity Framework Sentis. As an example the YOLOv8n and Yolov10n models were used (the default models are included here).
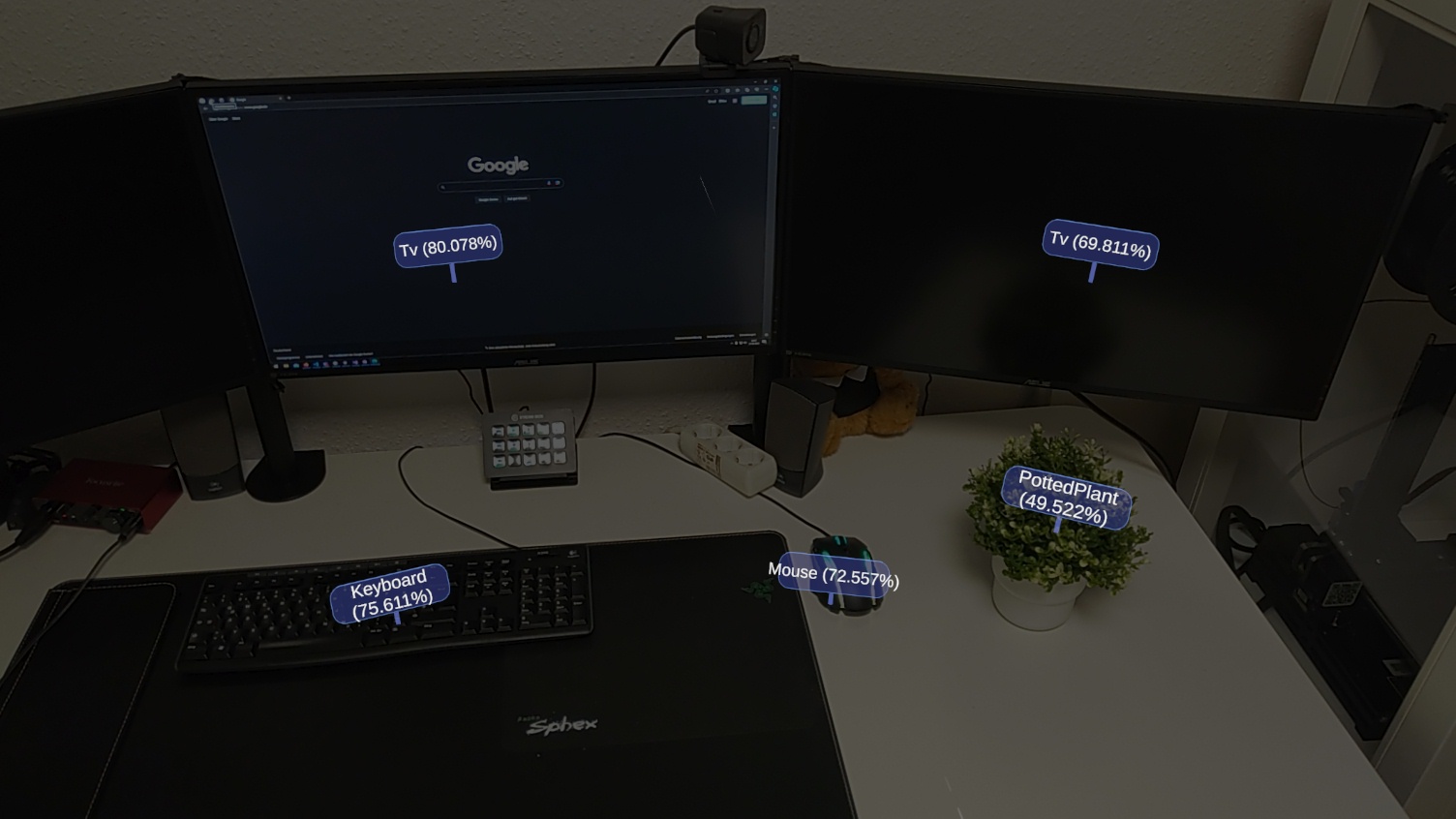
The model is executed as soon as the application is started. The recognized objects are identified with a label, which displays the recognized class and the associated detection probability (as you can see in the image). This label is placed in the center of the detected object by shooting a sphere cast onto the spatial mesh of the environment.
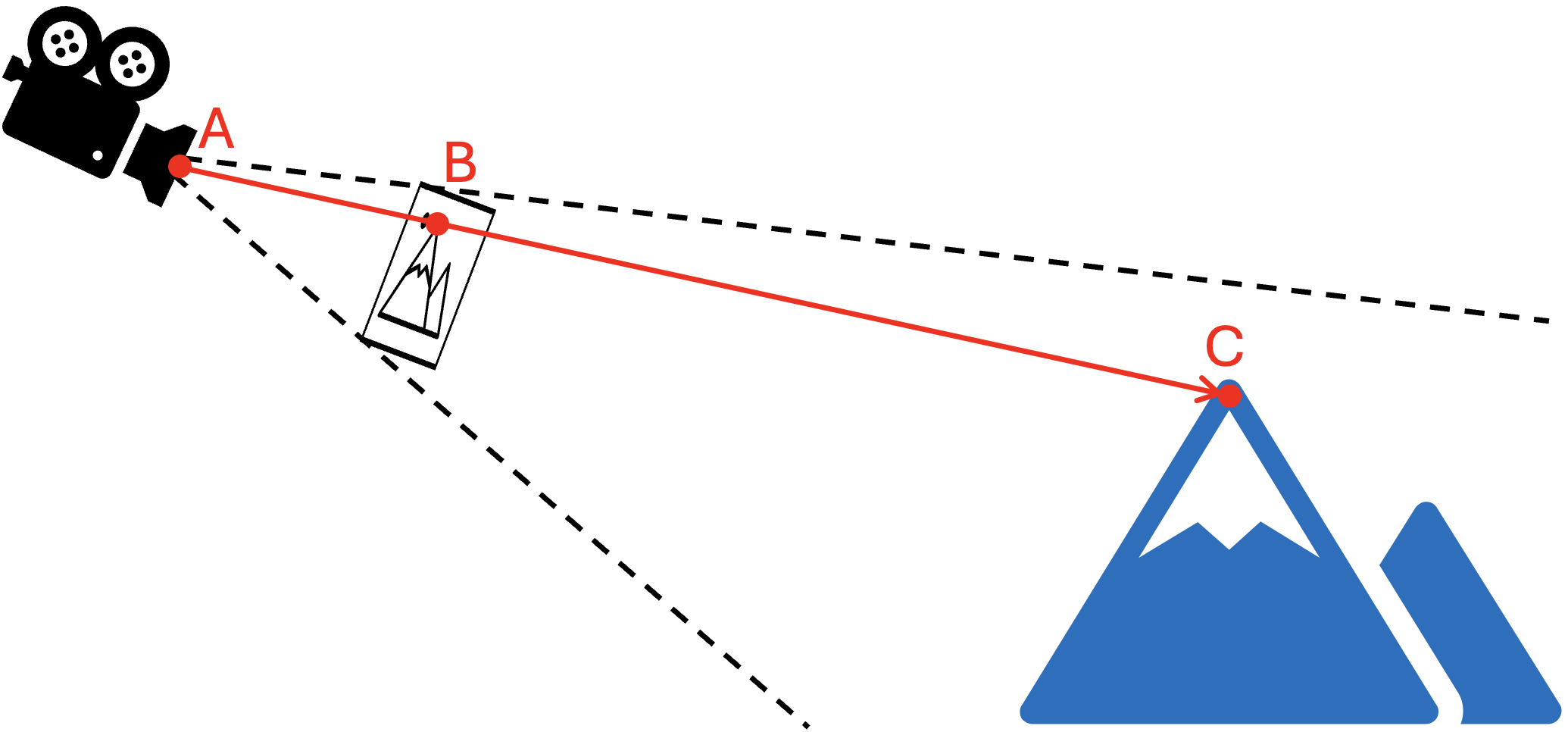
By combining the 2D position of the objects in the image with the information about the position of the camera and the spatial mesh, it is possible to estimate the position of the object in the 3D space. Therefore, the image is virtually positioned in front of the camera on a scale that is aligned with the field of view of the camera. Referring the following image you can estimate the position by casting a sphere starting in the position of camera A and going through the position of the object in image B. The point of the collision with the spatial mesh C is the estimated position of the object in the 3D space.
Detection of new objects / Removal of vanished objects
To reduce the error rate of recognisitions and increase robustness, an additional filter mechanism is integrated. A new object is only displayed in the user's field of view once it has been recognised in four consecutive model executions.
Furthermore, objects are not removed immediately if they are not recognised in a model execution. The object is only removed if it has not been recognised in the user's field of vision for three seconds. If the object is not in the user's field of vision, it remains at his position.
Features based on detections
In this example code, a label and optional debug information is displayed for each recognized object.
If you would like to execute your own functionality based on the recognized objects, the method TriggerDetectionActions in the YoloRecognitionHandler class can be extended.
For more details check out our Github repository