Abstract
This project addresses the critical challenge of image segmentation for autonomous vehicles operating in diverse weather conditions and low-light environments. Using the comprehensive BDD100K dataset and advanced deep learning models, I aim to enhance the ability of self-driving systems to accurately identify and segment objects such as roads, vehicles, and pedestrians in challenging scenarios. My approach involves fine-tuning two pre-trained models Xception U-Net and MobileNetV2 U-Net on the BDD100K dataset, which provides rich annotations for both daytime and nighttime driving scenarios. Through extensive preprocessing, data augmentation, and targeted training strategies, I evaluate and compare the performance of these models using metrics such as accuracy, IoU, Dice Coefficient, and precision recall. The results of this study contribute to improving the safety and reliability of autonomous vehicles in real-world, adverse conditions.
Introduction
Autonomous vehicles face significant challenges in accurately perceiving their environment, particularly in adverse weather conditions and low-light scenarios. This project focuses on enhancing semantic segmentation capabilities, a crucial component of autonomous driving systems, to improve object recognition and distinction in these challenging situations. By fine-tuning state-of-the-art deep learning models on the diverse BDD100K dataset, I aim to develop robust solutions that can maintain high performance across various driving conditions.
Methodology
Models and Architecture
I employed two advanced semantic segmentation models:
- Xception U-Net: Utilizing Xception as the encoder with a custom decoder for segmentation.
- MobileNetV2 U-Net: Employing a MobileNetV2 encoder for lightweight, real-time segmentation tasks.
Data Preprocessing and Augmentation
- Images and masks scaled to 256x256 pixels
- Pixel value normalization
- Augmentation techniques: horizontal flipping, brightness adjustment, rotation, and zooming
Training and Fine-Tuning
- Initial training on daytime images from BDD100K
- Fine-tuning on nighttime imagery for low-light specialization
- Loss functions: Dice loss and binary cross-entropy
Evaluation Metrics
- Accuracy
- Intersection over Union (IoU)
- Dice Coefficient
- Precision and Recall
Experiments and Results
Dataset
I utilized the BDD100K dataset, comprising 100,000 videos with diverse driving scenarios, including:
- Geographic locations: New York, San Francisco Bay Area
- Illumination conditions: daytime, nighttime, dusk
- Weather conditions: rain, fog
Experimental Setup
- Training Set: 92 samples (80% of total images)
- Validation Set: 23 samples (20% of total images)
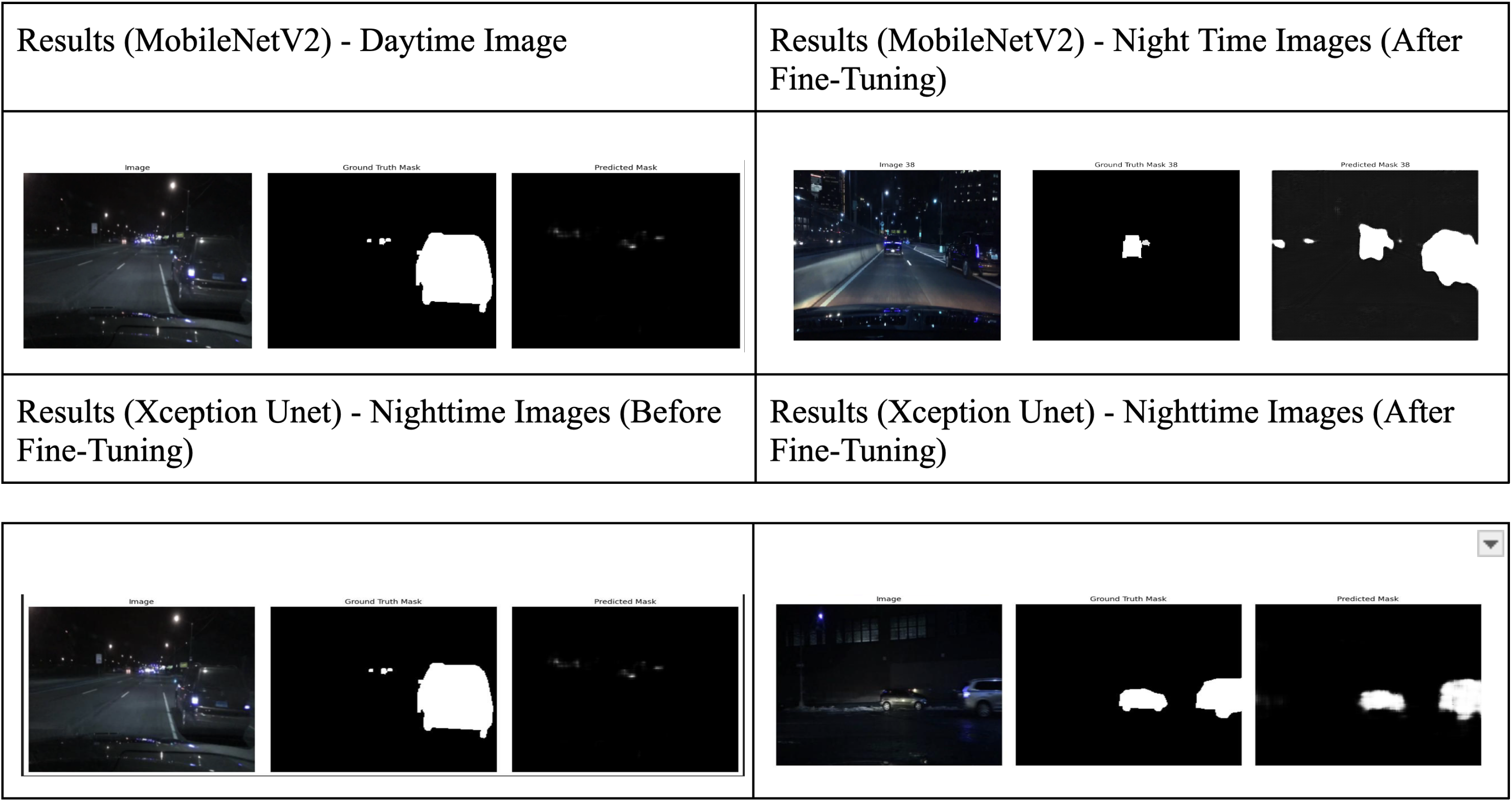
Results
| Model | Accuracy (%) | Dice Coefficient | Binary Cross-Entropy |
|---|---|---|---|
| MobileNetV2 | 90.40 | 0.08 | 0.197 |
| Xception U-Net | 99.50 | 0.8999 | 0.0129 |
Conclusion
This research contributes to the advancement of autonomous vehicle perception systems by improving image segmentation capabilities in challenging environmental conditions. The Xception U-Net model emerged as the most effective solution, demonstrating high accuracy and segmentation quality across diverse scenarios. These findings underscore the potential for enhancing the safety and reliability of autonomous driving systems through advanced deep learning techniques and targeted model optimization.