Car Lane Detection in Video using python Computer Vision OpenCv
Table of contents
Car Lane Detection in Video Using Python and OpenCV
https://github.com/olaiyayomi/Car-Lane-Detection-in-Video-using-python-Computer-Vision-OpenCv-
This project showcases a Python-based implementation of car lane detection in videos, leveraging the OpenCV library to process video frames and identify lane markings effectively.
Objective
The goal of this project is to provide a real-time visual representation of lane boundaries in a video feed. This can be useful in applications such as driver-assistance systems and autonomous vehicles.
Features
- Video Processing: The script reads a video file and processes each frame individually.
- Grayscale Conversion: Each frame is converted to grayscale to simplify image processing tasks.
- Edge Detection: Canny edge detection is applied to highlight lane markings.
- Morphological Operations: Enhancements are made to the detected edges for better accuracy.
- Hough Line Transform: This technique is used to detect line segments representing lanes in the video.
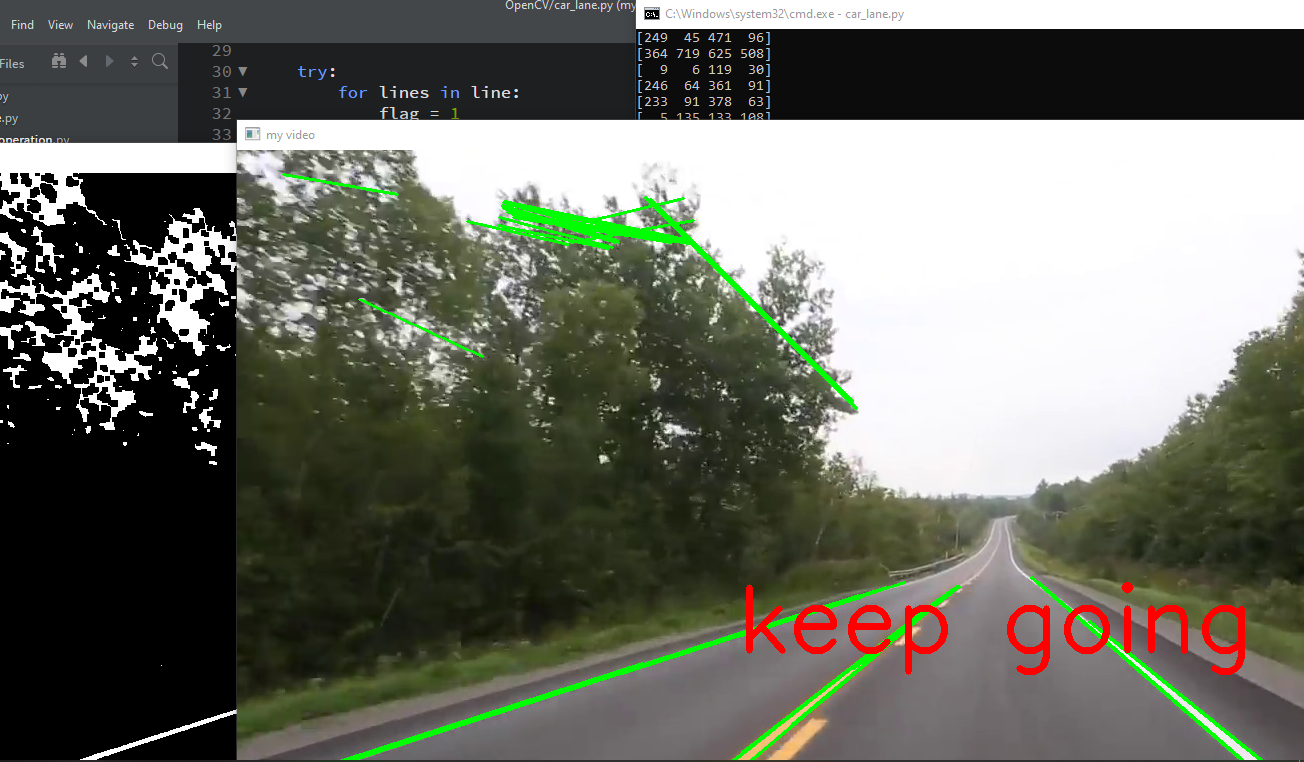
- Visual Feedback: Detected lanes are highlighted in green and overlaid on the original video frame.
- User Interaction: The program allows users to exit by pressing the 'q' key.
Prerequisites
- Python 3.x
- OpenCV library
Setup and Installation
- Ensure Python is installed on your system.
- Install the required libraries using:
pip install opencv-python - Place your video file (e.g.,
lane1.avi) in the project directory.
How It Works
- The script processes the input video frame-by-frame.
- It identifies lane boundaries using image processing techniques.
- The detected lanes are drawn on the video for visual feedback.
- Users can monitor the highlighted lanes, enhancing driving safety and awareness.
Project Files
lane_detection_video.py: Main Python script implementing the detection logic.lane1.avi: Sample video file used for testing lane detection.Screenshot 2024-01-20 190253.png: Screenshot of the lane detection output.README.md: Detailed documentation of the project.
Tags
#ComputerVision #MachineLearning #Python #ArtificialIntelligence #AutonomousVehicles #OpenCV #DataScience #Programming
This project demonstrates the application of Python and OpenCV in a practical scenario, paving the way for innovations in computer vision and autonomous systems. It combines efficient algorithms and real-time processing to create a foundational lane detection system.