3D to 2D: Using Image Segmentation to Automate Rotoscoping
https://github.com/saripagurek/3D-to-2D-Image-Segmentation
Motivation
Rotoscoping is a widely used technique in animation that involves tracing frame-by-frame
over a video to create a 2D sequence. A frequent first step in this rotoscoping process, as
well as in many artistic practices, is to break down the 3D figure into its key shapes before
then moving on to further detail. One can see how in a larger animation project that is
minutes or even hours long at the standard of 30 frames per second, this frame-by-frame
drawing process can become exceptionally tedious and time consuming. There exist some
tools within the field that ease this manual process, however it remains an extremely timeconsuming task. The motivation for this project is to explore how a trained neural network
can streamline this process and reduce the manual effort required from animators.
Successfully automating this step would mark a significant advancement in the
rotoscoping process, providing animators with a more efficient tool to create animation
from live-action or 3D sequences while allowing them to focus on creative refinement.
Problem Description
This project works towards the problem of automating rotoscoping within the field of
animation, by transforming a 3D visual into a 2D representation. To achieve this, we
propose using semantic image segmentation techniques. Given a frame of a 3D scene, our
goal is to segment the image into a simplified 2D visualization by extracting distinct tonal
areas including highlight, material tone, diffuse shadow, cast shadow, and background.
This simplified output would serve as a starting point for further refinement and drawing by
the artist, minimizing or even eliminating the need for repetitive tracing.
Dataset & Preprocessing
Given our prior research, we determined that no existing dataset fully meets the
requirements of this project. Thus, we created our own through 3D modelling in Cinema4D,
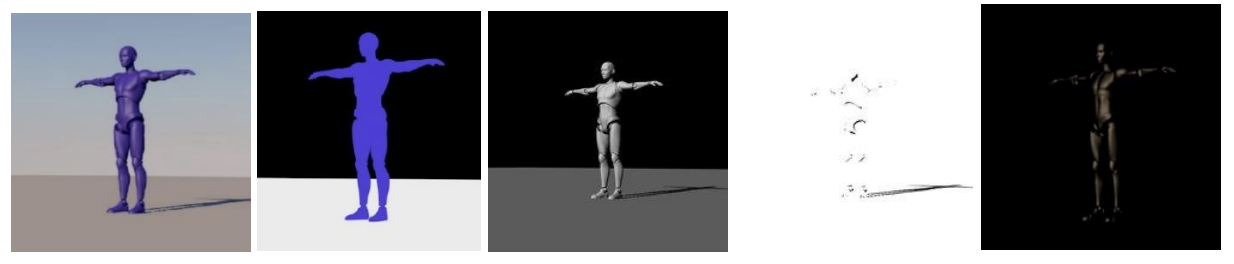
multi-pass rendering, and a preprocessing pipeline. To begin, we created several different
3D scenes within the modeling software which could be output as 90 frame video
sequences. We then used Cinema4D’s multi-pass renderer to output individual layers of
the scene: material colour, illumination, specular, and shadow.
Examples of the frame exported from Cinema4D, followed by its individual multi-pass
layers:
To reduce data size, we compressed and cropped the images to work on a smaller 200 x
200-pixel scale. We also converted the image formats from RGBA to greyscale. Next, we
developed a threshold system to preprocess these multi-pass layers. This involved
checking each layer separately, setting a colour value threshold to classify each off the 4
layers, labelling each pixel, converting each layer to a transparent png with only it’s
specified class, and then compositing them all back together with an additional
background as a separate class. For example, the specular render only contains pixels
where light is reflecting off material in the scene, with the rest of the image pure black. With
the pixel-by-pixel analysis, we can separate out the sections of the image above a certain
brightness and declare it as the highlight.
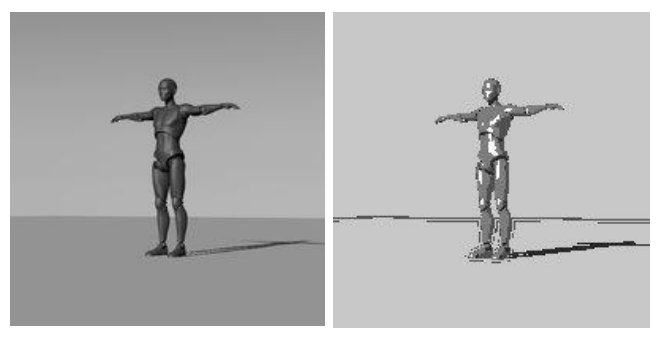
Below you can see an example of each preprocessed layer, followed by the final
composited image:

With several video sequences of different 3D scenes, we ended up with approximately
1000 datapoints to train our model on. For each input greyscale image, we used our
preprocessed segmented image as the label.
Experimental Setup
For this project, we selected the neural network model the U-Net due to its suitability for
image segmentation. Additionally, it is notably effective when working with smaller
datasets, a crucial factor for our project since we were generating our own custom dataset
from scratch. During implementation, we followed a typical U-Net architecture,
incorporating its encoder-decoder structure with skip connections. To implement our
model, we used the Python programming language with Pytorch libraries in VSCode, and
Github for filesharing. The data creation was done using Cinema4D.
The U-Net is designed with a symmetrical encoder-decoder architecture to facilitate
semantic image segmentation. The encoder progressively down samples the input image,
reducing its spatial dimensions while increasing the feature channels. Conversely, the
decoder upscales the feature maps back to the original image dimensions, producing
image segmentation maps. Both sections use double convolution blocks implemented
with ReLU activation functions.
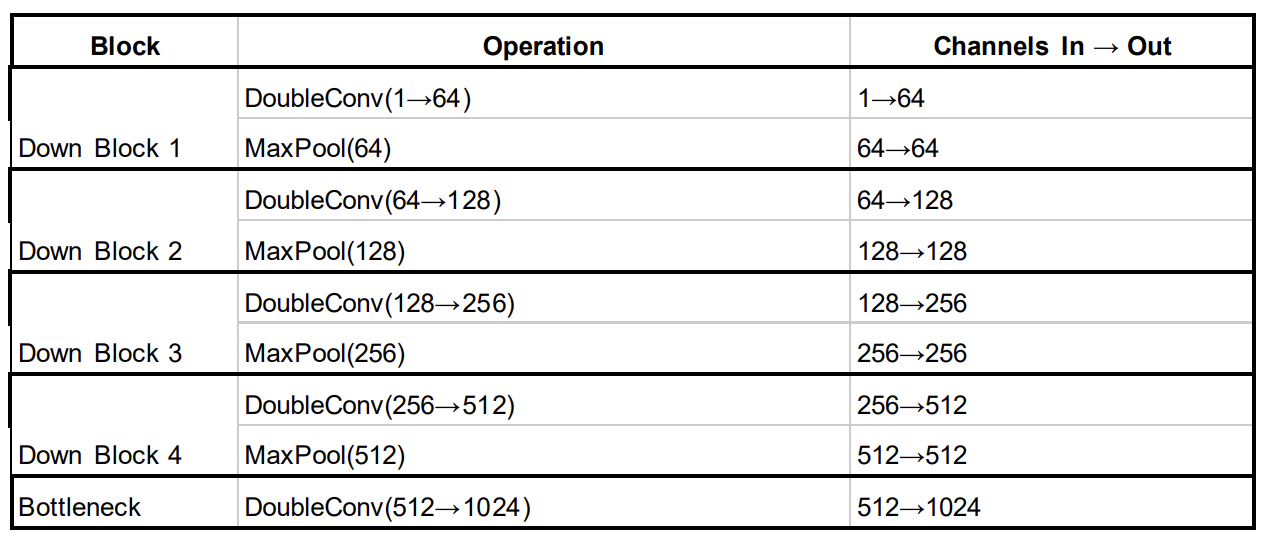
Encoder (Down)
The encoder comprises of four down sampling blocks, each including the double
convolution followed by a max-pooling operation to reduce the spatial dimensions. As the
resolution decreases, the model captures increasingly abstract features, culminating in a
bottleneck layer with a maximum of 1024 channels.
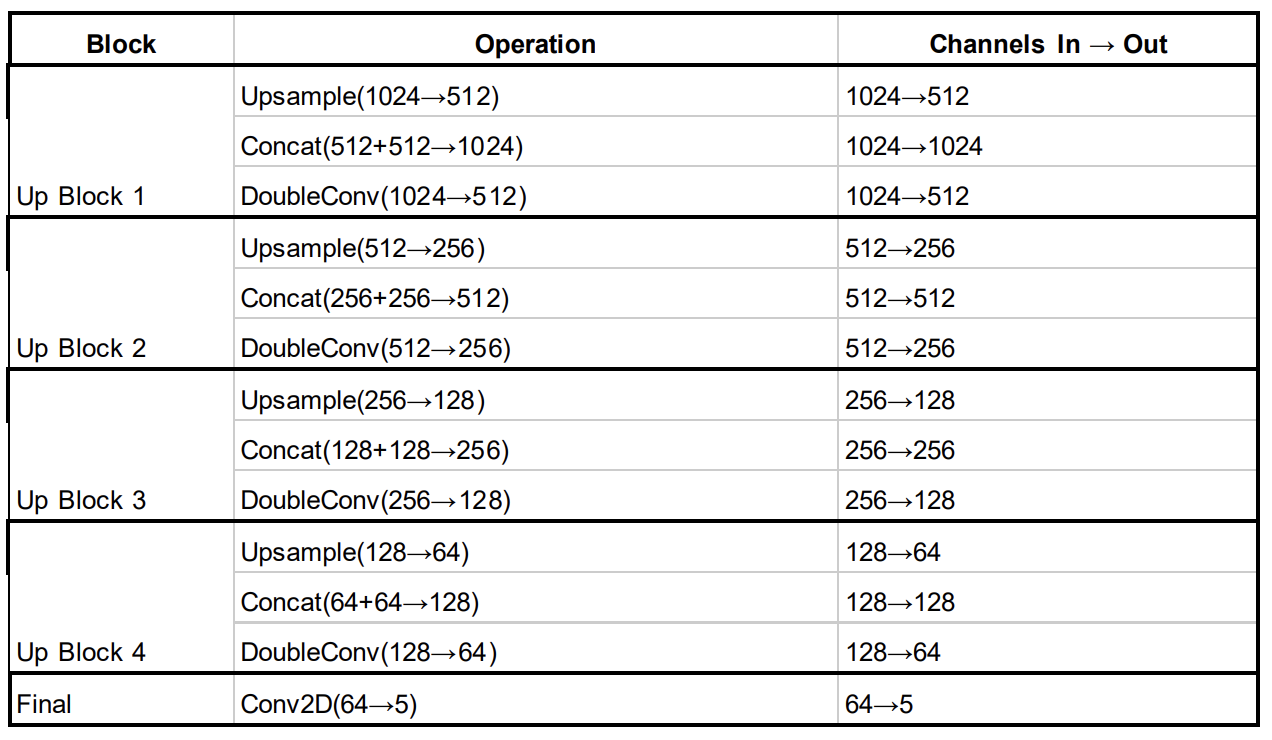
Decoder (Up)
The decoder mirrors the encoder, consisting of four up sampling blocks to increase the
number of feature channels. Each block includes an up-sampling operation to halve the
number of channels, a concatenation step to integrate features from the corresponding
encoder block (doubling the number of channels), and a double convolution that halves
the out channel again. This process ensures the preservation of spatial information while
refining feature representations. By the final decoder block, the feature maps are reduced
to 64 channels, which is then further compressed to 5, to correspond with the model’s 5
segmentation classes. These outputs can then be passed through a softmax function to
compute the class-wise confidence scores, facilitating accurate pixel-level predictions.
Training, Testing, and Validation
Before training, the dataset was divided into training, validation, and testing partitions.
Since the dataset contained 14 unique scenes of 90 images, 3 of the scenes were used as
the test set to make sure that the model did not have access to very similar data in both the
training and testing sets. The remaining images from the other 11 scenes were randomly
divided into training and validation partitions using an 80/20 split.
Training of the model was performed over 40 epochs using the Adam optimizer with an
initial learning rate of 10−4
. 40 epochs was chosen as the stopping point based on an analysis of the loss plot and to avoid overfitting to the training data. Since this can be
described as a multiclass classification problem, the cross-entropy loss function was used to determine the loss of the network. All training was performed on an NVIDIA RTX 4060
GPU with a batch size of 32 to speed up training times.
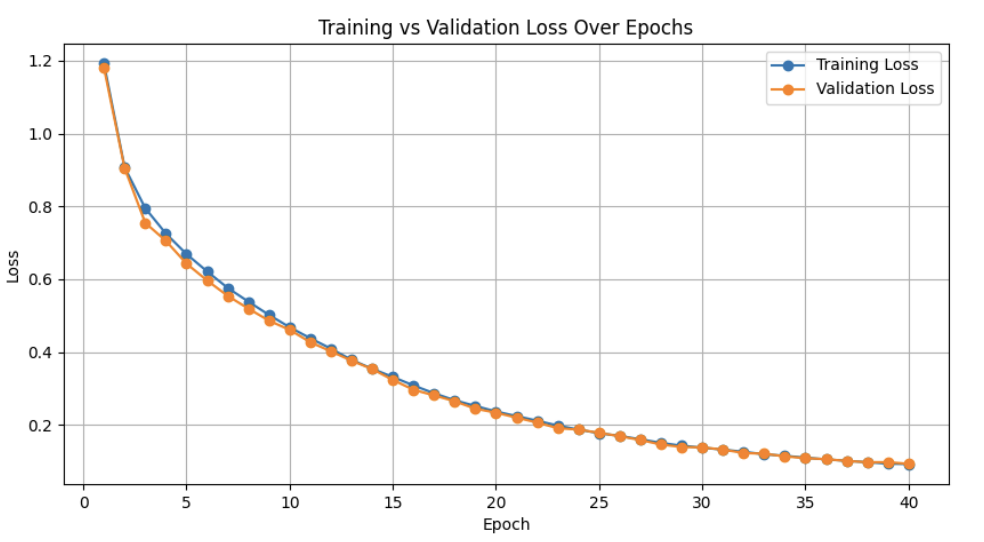
Using the hyperparameters described above, the training produced a smooth, steadily
decreasing loss curve which flattened out around 40 epochs at a loss value of
approximately 0.09. The validation loss curve also followed a similar pattern. The loss plot
for the training can be seen below
Challenges of Training
One challenge that we encountered during training was how to process the labels for the
loss function. Our first iteration of the code was incorrectly using grayscale intensities to
convert the label images into classes instead of the dictionary that mapped classes to
values from the preprocessing script. This initially caused our model to train using incorrect
ground truth values and severely hampered performance. Once this was fixed, the model
trained properly and achieved much better cross-entropy loss.
Testing
The model was tested using both the cross-entropy loss function and by visually inspecting
the outputs of the model. To help with the visual inspection, each scene was stitched into
gifs to match the original camera movement through the scene. Examining the gifs allowed
us to make sure that there were no visible jumps between frames and that the highlights
and shadows moved through the scene as expected.

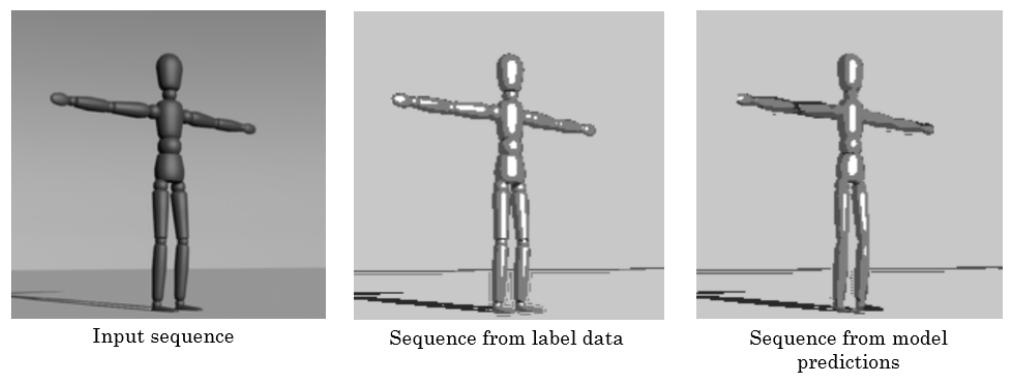
As seen in the table, the overall loss of the model across all datasets was very small.
However, an even more important metric was using the “eye-test” to determine if the
semantic outputs of the model would be useful to a human animator. After comparing the
model output with the input side-by-side, we determined that our model also passed this
test and produced accurate and useful outputs.
Conclusion & Future Work
In conclusion, we believe our project successfully achieved the goals we set at the outset.
Using a U-Net neural network, we developed a model capable of segmenting unseen
frames into five distinct classes: highlight, material tone, diffuse shadow, cast shadow, and
background; with sufficient accuracy to reassemble smooth video sequences. These
results are particularly promising given the constraints of limited training time and a small
dataset, and they demonstrate performance comparable to existing automated
rotoscoping techniques. To transition from a research proof-of-concept to a practical tool
for animators, future work could focus on incorporating higher-resolution datasets, training
on more complex scenes and backgrounds, and refining the segmentation process to
handle a broader range of animation styles.