Visual Servoing of a Line Following Robot
Table of contents
Integrated Lane Detection and Lane-Keeping System Using Computer Vision and Motor Control Algorithms
This project presents the development of an innovative system that integrates lane detection using computer vision and deep learning techniques with a lane-keeping system utilizing advanced motor control algorithms. By combining these technologies, the system aims to achieve efficient and accurate autonomous lane-following functionality.
System Overview
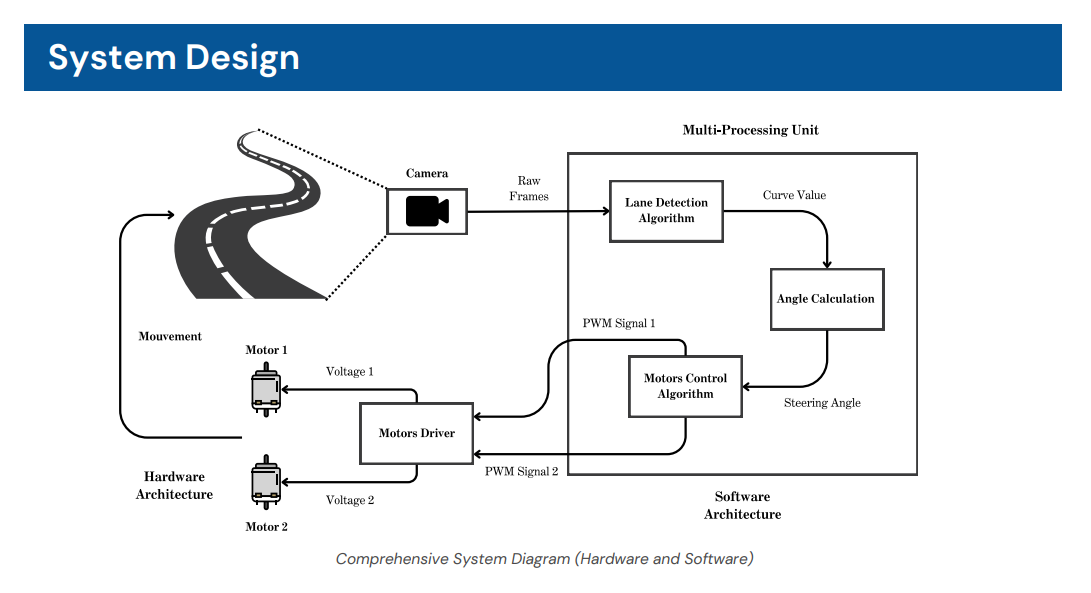
The proposed system comprises the following core components:
- Camera Module: A Raspberry Pi Camera is used to capture real-time road imagery.
- Processing Unit: A multi-processing unit handles computational tasks, including lane detection and angle computation.
- Motor Driver: An L298 Dual H-Bridge Motor Driver regulates power delivery to the motors.
- Motors: Two 12V DC motors provide mobility and directional control.
Workflow and Operation
- Image Capture: The Raspberry Pi Camera captures raw frames of the road in real-time.
- Lane Detection: The captured frames are processed by a lane detection algorithm running on the multi-processing unit. This algorithm identifies the lane boundaries and calculates the lane's curve value.
- Angle Calculation: The curve value is fed into an angle calculation module to determine the necessary steering angle for the vehicle.
- Motor Control: The computed steering angle is passed to a motor control algorithm, which generates two Pulse Width Modulation (PWM) signals.
- Motor Driver Adjustment: The PWM signals are used by the L298 Dual H-Bridge Motor Driver to control the voltage supplied to the DC motors. This ensures precise adjustments to the steering and speed of the vehicle, allowing it to stay centered in the detected lane.
Key Features
- Real-time Processing: Leveraging a high-performance processing unit enables real-time detection and corrections, essential for dynamic environments.
- Scalability: The modular design supports the integration of additional sensors or algorithms, enhancing functionality and adaptability.
- Energy Efficiency: Optimized PWM signals and voltage control minimize power consumption while maintaining system performance.
** Applications**
This system is particularly well-suited for autonomous vehicles, agricultural machinery, and robotics applications requiring reliable lane-keeping functionality.