Abstract
OrbitGuardians is an autonomous Agentic AI + Robotics system designed to address the growing crisis of space debris pollution. Leveraging the power of multi-agent collaboration, this system deploys a crew of specialized AI agents working in sync with orbital robots to predict, plan, and execute space debris removal missions.
The core innovation lies in the CrewAI framework, where agents specialize in tasks such as debris risk prediction, compliance with space treaties, real-time collision avoidance, and optimal selection of capture methods (harpoon, net, drag sail, laser ablation). The system continuously learns from past missions, improving future decisions and balancing environmental safety with operational efficiency.
Introduction
With space becoming increasingly crowded, OrbitGuardians offers a scalable, autonomous, and legally compliant solution to keep Earth’s orbits safe and sustainable, ensuring future generations can continue exploring and benefiting from space technologies.
Methodology
Layer Component Role
Data Layer Real-time TLE data (orbital positions), satellite telemetry, historical debris data Input for prediction and planning
Prediction Agent AI agent trained to predict future high-risk collisions based on orbital dynamics Risk forecasting
Policy Agent Agent that checks each cleanup plan against international space law (Outer Space Treaty) Legal compliance
Cleanup Agents Agents representing different debris capture tools (net, harpoon, drag sail, laser) Executes capture
Logistics Agent Manages robotic fuel, positioning, and return path planning Mission optimization
Coordination Agent Oversees all agent communication, resolves conflicts, tracks performance CrewAI conductor
Feedback Loop Learning agent that updates prediction models based on actual debris capture success/failure Continuous learning
Experiments
🧩 Agentic AI Crew Example Workflow (Sample Scenario)
🔴 Prediction Agent detects high-risk debris fragment near Starlink satellite
🟡 Policy Agent verifies capture is legally allowed (not owned by another nation)
🟢 Cleanup Agents debate best method (net vs laser) based on size & speed of debris
🟣 Logistics Agent calculates optimal robot path to capture + return
🔵 Coordination Agent resolves timing conflicts, manages energy usage
⚪ After capture, Feedback Agent updates prediction model based on capture success/failure
+----------------------+
| Data Collection |
| (NASA Space-Track API)|
+----------------------+
|
v
+----------------------+
| Preprocessing & |
| Feature Engineering |
+----------------------+
|
v
+----------------------------------+
| Object Classification Model |
| (Debris, Satellite, Rocket) |
| (XGBoost/RandomForest) |
+----------------------------------+
|
v
+----------------------+
| Collision Risk |
| Forecasting Model |
| (Time Series) |
+----------------------+
|
v
+----------------------+
| Alert Scoring & |
| Threat Assessment |
+----------------------+
|
v
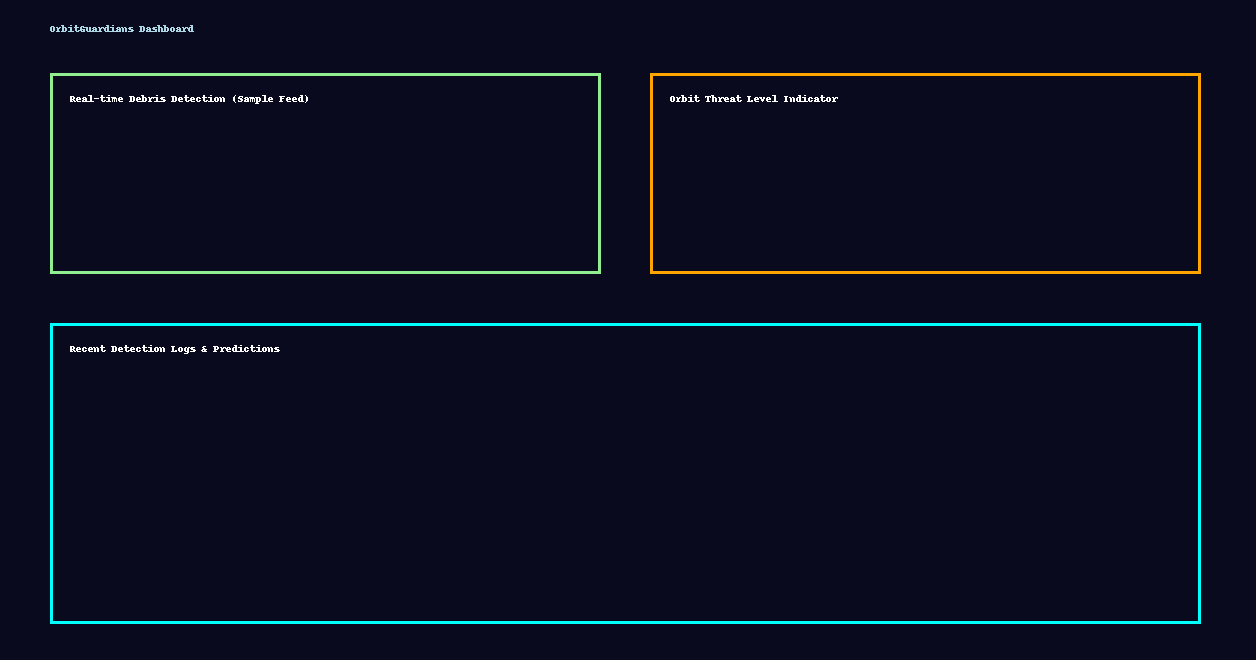
+-----------------------------------+
| Streamlit Dashboard |
| Real-Time Object Tracking & |
| Visualization Layer |
+-----------------------------------+
|
v
+-----------------------------------+
| Future Improvements Loop |
| (Radar Imaging, Real-time AI |
| Integration, Satellite Telemetry) |
+-----------------------------------+
Conclusion
• Scale from LEO (Low Earth Orbit) to GEO (Geostationary)
• Add AI ethics layer (who is responsible if debris capture fails and damages active satellite?)
• Add user-in-the-loop override for high-risk scenarios
• Collaborate with existing satellite companies (like SpaceX) for live data feed
• Potential for Earth-based autonomous waste management systems using the same CrewAI logic
This is just the first prototype. Here’s where I want to take it:
✅ Integrate real-time space debris tracking data from NASA or ESA
✅ Add reinforcement learning to train robotic arms for irregular shapes
✅ Collaborate with satellite manufacturers to build self-cleaning satellites
✅ Explore collaborative capture swarms — multiple satellites working together to collect debris faster