Advanced Lane Detection System Using OpenCV: A Deep Dive into Modern Road Safety Technology
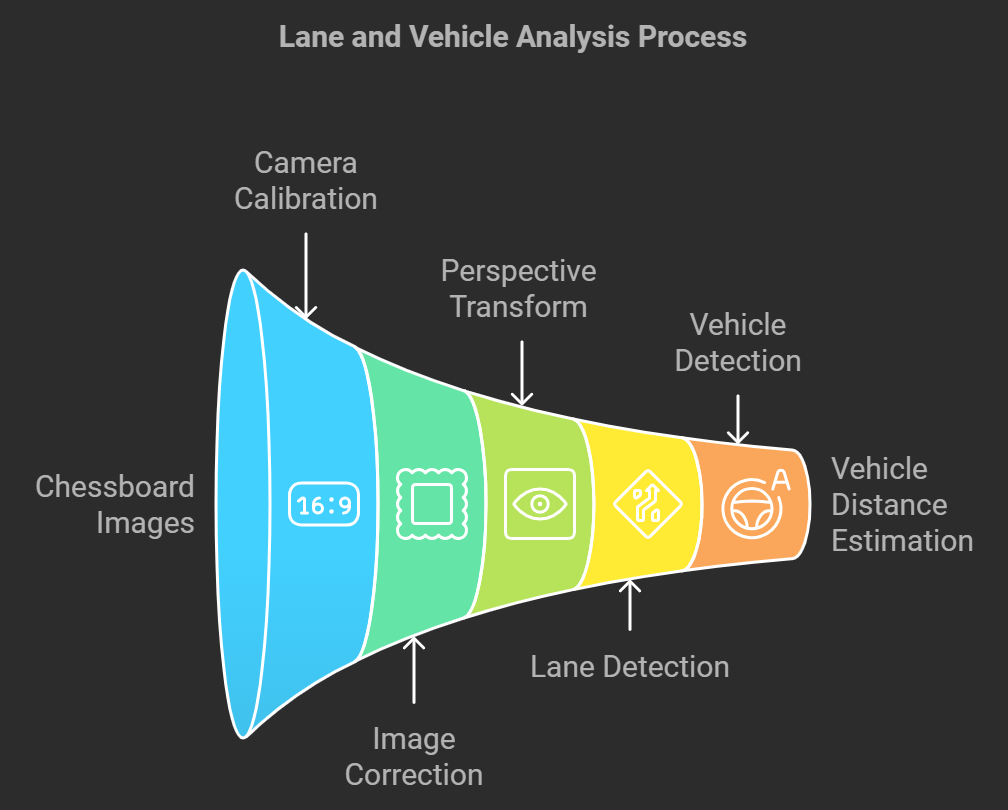
Table of Contents
- Introduction
- Overview of the Lane Detection System
- Technologies and Techniques Used
- Step-by-Step Explanation
- Results and Evaluation
- Conclusion
- Future Work
- References
Introduction
Lane detection is crucial for autonomous vehicles and advanced driver-assistance systems (ADAS). Accurate lane detection allows vehicles to make real-time decisions to ensure road safety, especially in dynamic driving conditions. This project aims to create a robust lane detection system using a combination of traditional computer vision techniques (like edge detection and Hough Transform) and machine learning-based methods for vehicle recognition.
Overview of the Lane Detection System
Our system is designed to extract lanes and vehicles from a given road image or video. It leverages several computer vision techniques using OpenCV, combined with machine learning methods for accurate and efficient lane and vehicle detection. This project was developed with the following key goals:
- Accurately detect and highlight lane lines under diverse lighting and weather conditions.
- Detect and estimate the distance of vehicles to assist with collision warnings.
- Provide a bird's-eye view of the lane for additional perspective.
Technologies and Techniques Used
OpenCV
OpenCV (Open Source Computer Vision Library) is a powerful tool for image processing. This project utilizes OpenCV for camera calibration, thresholding, edge detection, and perspective transformations.
Camera Calibration
Camera calibration is a critical step to remove lens distortion. Distorted images can impact the accuracy of lane detection. We use chessboard patterns to extract intrinsic camera parameters to undistort images.
Image Thresholding
Thresholding helps to extract relevant lane pixels from the image by focusing on color spaces like HLS and LAB. This step is crucial for isolating lane lines from the rest of the road.
Perspective Transformation
Perspective Transformation converts the image from a front view to a top-down (bird’s-eye) view. This transformation makes it easier to detect lanes and track their curvature.
Lane Line Detection
Using a combination of edge detection (Canny edge detector) and Hough Transform, our system accurately identifies straight and curved lane lines in the image. Polynomial fitting helps to visualize lane boundaries.
YOLO-based Car Detection
YOLO (You Only Look Once) is a deep learning-based object detection model. It detects vehicles such as cars, buses, and trucks, allowing the system to estimate distances and track other road users.
Step-by-Step Explanation
Camera Calibration Step
Camera calibration is essential to correct image distortions:
- Chessboard Calibration: Using several frames with a visible chessboard pattern, intrinsic parameters are extracted.
- Undistortion: This ensures that all images are geometrically accurate, leading to more reliable lane detection.
Image Preprocessing
- Color Conversion: Convert images to HLS and LAB color spaces to isolate lanes based on their color intensity.
- Thresholding: Use relative and absolute thresholds to identify lane pixels, combining results from multiple channels for a comprehensive lane map.
Lane Detection Process
- Perspective Transformation: Convert the undistorted image to a top-down view.
- Edge Detection: Use the Canny edge detector to highlight sharp changes in pixel intensity (edges).
- Hough Transform: Detect straight lines in the image that correspond to lane boundaries.
- Lane Plotting: Fit detected lane points with a second-degree polynomial for smooth lane visualization.
Overlaying Aerial View
An aerial view of the lane provides an intuitive understanding of lane curvature:
- Bird’s-Eye View: The transformed image is generated.
- Overlay: The aerial view is overlaid on the original image to give a dual perspective.
Combining Vehicle Detection
- Object Detection: YOLO detects vehicles in the image, drawing bounding boxes around them.
- Distance Estimation: Uses bounding box properties to estimate the distance of vehicles.
- Overlay: Detected vehicles are annotated with distance markers and overlayed on the final image.
Results and Evaluation
The project delivers reliable lane detection and accurate vehicle recognition in a variety of conditions:
- Lane Detection Accuracy: Successfully identifies lane boundaries on highways, urban roads, and under different lighting conditions.
- Vehicle Detection: Efficiently detects cars, buses, trucks, and motorcycles with YOLO, providing real-time feedback on vehicle distances.
- Bird’s-Eye Overlay: Enhances lane visibility and provides a unique perspective for better lane tracking.
Conclusion
This advanced lane detection system is a step towards safer road environments. By integrating traditional image processing techniques with modern object detection, we have created a hybrid solution that enhances lane detection accuracy and vehicle awareness. This system has potential applications in autonomous vehicles, driver-assistance technologies, and road safety monitoring.
Future Work
Potential improvements include:
- Real-time Performance Optimization: Use hardware acceleration (GPU) for faster processing.
- Improved Vehicle Detection: Integrate more sophisticated models like YOLO11 or transformers.
- Handling Edge Cases: Account for diverse weather conditions such as rain, fog, and night-time driving.
- Curved Lane Accuracy: Enhance polynomial fitting for better handling of sharp curves and hilly terrain.
References
- OpenCV Documentation
- Ultralytics YOLO Documentation
- Advanced Lane Finding and Vehicle Detection tutorials on Medium and Towards Data Science.
This project showcases a cutting-edge approach to lane detection, combining robust computer vision methods with the latest in machine learning. As lane detection technology evolves, systems like this will play a critical role in making autonomous driving safer and more reliable.